
刊行物



【特集】
重力と運動制御

山本 真史(やまもと しんじ)
Profile─山本 真史
2014年,京都大学大学院人間・環境学研究科博士後期課程修了。博士(人間・環境学)。大阪体育大学体育学部助手を経て,2017年より現職。専門はスポーツ心理学。著書は『これから学ぶスポーツ心理学 改訂版』(分担執筆,大修館書店),『運動生理学 第4版』(分担執筆,化学同人),『ヒトの動き百話:スポーツの視点からリハビリテーションの視点まで』(分担執筆,市村出版)など。
国際宇宙ステーションで宇宙飛行士が活動する様子を,テレビのニュースなどを通して時折目にする。宇宙飛行士はステーション内で,宙を浮きながら,まるで水中を泳ぐように移動する。この光景は,地球の陸上での生活では見られない。なぜなら,重力が私たちの身体を拘束しているためである。日常生活において,私たちが重力の存在を意識することは稀である。先の宇宙飛行士が宇宙で生活を送る風景をテレビを通して見た時に,(無)重力について意識する程度ではないだろうか。
地球上において,重力は身体を鉛直下方向に牽引しているにもかかわらず,私たちはその重力の牽引作用を特に意識することなく,目的とする運動をうまく行っている。では,如何にして,これが可能になっているのであろうか。
運動を制御するしくみ
コーヒーカップに手を伸ばし,それを口元に近づけるような一見簡単な日常生活での運動について考える。まずコーヒーカップの位置や形状,素材といった情報を視覚や記憶に基づき取得する。次に,それらの情報を統合し,目的とする運動を計画する。そして,その計画した運動の指令を脊髄を介して筋に送り,運動を実行する。運動の結果が予測と異なっていた場合,その誤差を小さくするように運動が学習されていく。
詳細は後述するが,私たちが地球の重力場の中で,目的とする運動を学習し,制御できていることは,重力の存在を脳が把握しており,身体に働く重力の力学的な作用を脳が考慮して,運動を制御していることを示唆している。
重力の内的表象
重力は,地球上で,私たちを拘束する環境条件のひとつであり,私たちの認知や運動に多くの影響をもたらす。そのような拘束の中で,私たちがうまく運動できるのは,重力が内的に表象されているためと考えられ,その例として,落下するボールを捕球する場面で考えてみる。私たちが落下するボールを捕捉しようとする時,落下するボールのオンラインの視覚情報は確かに重要であるが,脳が視覚情報を処理し,その情報に基づき筋に運動指令を送るには時間遅延が存在するため,私たちは時空間的(いつ・どこ)にボールの落下位置を推定し,その推定情報を考慮した上で,捕球を完了する。この時,ボールが鉛直方向の最高点から加速的に落下することが脳で表象されているがゆえに,うまく捕球することができるのである(Zago, et al., 2008)。
地球における重力環境つまり1G環境と異なる0G環境に私たちが曝露される時,上述のボールの捕捉運動はどのようになるであろうか。スペースシャトル内での0G環境において,種々の速度で落下させるボールの捕捉運動,およびその運動に関連する筋活動を測定し,1G環境でのそれらとを比較した研究がある(McIntyre, et al. 2001)。0G環境で捕球を行う際,ボール落下の加速度は1G環境での9.81m/s2という加速度にはならず,捕球に先行する筋活動および運動の開始は,1G環境に比べて早い時点で観察される。このことは,0G環境でのボール落下に対応できていないことを示唆している。このように,0G環境への曝露を用いた研究で明らかになる1G環境への私たちの適応は,「重力(1G)」が脳内で表象され,利用されていることを示唆しているのである。
重力を活かした運動制御
上述のように,1G環境で運動を行う際,脳は身体に対して働く重力の力学的作用を考慮して運動を制御する。机の上のコーヒーカップに手を伸ばすような日常生活での運動はじめ,ダイナミックなスポーツ場面での運動においても,これらの運動は全て,身体に働く重力の力学的作用が考慮されているがゆえに成されている。
日常生活において,私たちは当たり前のように,目的とする運動を遂行するが,その運動が実は重力の力学的作用が考慮された上で成立していることに気づくことはほとんどない。目的とする運動の結果を達成するために,脳は重力をはじめとする内外さまざまな運動に影響する要因を考慮して運動指令を生成する。重力場の中で,私たちが運動の目的を達成している事実を踏まえると,私たちは重力の力学的作用を日々考慮して生活を送っていると言える。では,私たちは,身体に対する重力の作用をどのように考慮して運動を制御しているのであろうか。
筆者らの研究を含め,種々の研究はこの疑問の解決に取り組んできた。その多くは,鉛直上下方向に上肢を移動させる運動を対象に,脳がどのように重力の力学的作用を考慮しているのかを明らかにしようとしたものである。例えば,筆者らの研究では,鉛直上下方向にターゲットを配置し,手を鉛直上方向または下方向に移動させ,ターゲットを把握する時の運動学的特性(キネマティクス)を調査した(図1左,Yamamoto & Kushiro, 2014)。手を伸ばしてターゲットを把握する運動(到達把握運動)は,手をターゲットへ到達させる運動成分(到達運動成分)と,手指をターゲットの形状に合わせる運動成分(把握運動成分)に分けられる(van de Kamp & Zaal, 2007)。図1の右図は,到達運動成分の評価が可能な手首の速度曲線を示している。上方向への運動(実線)と下方向への運動(点線)を比較すると,二つの速度曲線の形状が異なり,曲線の最大値つまり最大速度が,下方向への運動に比べて,上方向への運動において早い時点で生じていることがわかる。同様の鉛直上下方向間でのキネマティクスの相違,特に速度曲線の形状の相違は,鉛直方向に配置されたターゲットを指差すポインティング運動でも多く確認されている(Gaveau & Papaxanthis, 2011; Gaveau, et al., 2016)。
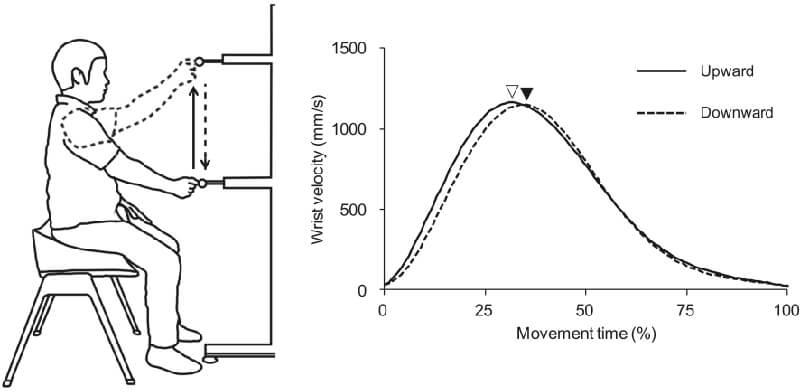
左図は鉛直上下方向への運動課題の様子を示している。鉛直上下に配置されたターゲットの一方から他方へ手を伸ばし,それを把握する。実線は上方向への運動を表し,点線は下方向への運動を表す。右図は手首の速度曲線を示しており,白の逆三角形は上方向への運動における最大速度の時点を示し,黒のそれは下方向への運動における最大速度の時点を示す。Yamamoto & Kushiro(2014)から引用。
鉛直上下方向への上肢運動において,上肢の姿勢は運動の進展に伴い鉛直面上で変化するため,上肢の姿勢の変化に応じて,重力トルクは変化する。他方で,左右方向への上肢運動では,上肢の姿勢は鉛直性にほとんど変化しないため,重力トルクは運動の進展にかかわらず,一定となる。実際,鉛直上下方向および水平左右方向へのポインティング運動の重力トルク,およびキネマティクスを評価した研究がある(Gentili, et al., 2007)。鉛直上下方向への運動では,重力トルクが上肢の姿勢に応じて変化するとともに,速度曲線の形状が上下方向間で異なることが確認されている。他方,水平左右方向間では重力トルクおよび速度曲線の形状が異ならず,方向特異性は観察されないことが知られている。
このように,鉛直上下方向へ手を伸ばす運動において,運動方向間で速度曲線の形状は異なるが,この方向特異性の機序は次のように考えられている。鉛直上方向への運動において,重力は運動方向(上方向)に対して減速作用を有する一方で,下方向への運動では,運動方向(下方向)に対して加速作用を有する。速度曲線における運動開始から最大値までの局面は加速局面を示し,最大値から運動終了までの局面は減速局面を示す。下方向への運動に比べて,上方向への運動では,最大値を早い時点でむかえるため,減速局面が相対的に長くなる。これは,重力が上肢を減速させる局面(減速局面)を長くし,重力の減速作用をうまく活かしていることを示唆している。
他方で,下方向への運動では,上方向への運動に比べて,最大値を遅れてむかえるため,加速局面が相対的に長くなる。これは,重力が上肢を加速させる局面(加速局面)を長くし,重力の加速作用をうまく活かしていることを示唆している。また,鉛直上下方向への運動におけるそれらの局面のうち,それぞれの運動の主働筋と拮抗筋が共に活動しない局面,つまり上肢が自由落下する局面が存在することが確認されている(Berret, et al., 2008)。これらは,筋による運動のエフォートを最小化するために,脳が重力の力学的な作用を利用していることを示唆している(Gaveau, et al., 2016)。
なお,上肢のみの運動だけでなく,物体を鉛直方向に移動させるような物体を伴う運動において,手の速度曲線の形状が物体の重量に応じて異なることも確認されている(Yamamoto, et al., 2016)。これは,身体だけでなく,身体が働きかける物体をも包含したシステムとして,重力の力学的作用を脳が考慮し,運動制御を行っていることを示唆している。
重力に対する適応
上述の鉛直方向への運動におけるキネマティクスの特徴は,私たちが地球の1G環境に適応した結果を表している。そのように考えると,0G環境に曝露される中で,鉛直上下方向へ手を伸ばす運動を継続して行うと,0G環境への適応が観察されるはずである。
パラボリック飛行という微小重力(0G)局面を作ることのできる飛行を行い,0G局面に上肢の鉛直方向へのポインティング運動を測定した研究では,0G環境への曝露初期には,地球上(1G)での運動と同様のキネマティクス,つまり上述のような鉛直上下方向間での速度曲線の相違が観察される(Papaxanthis, et al., 2005; Gaveau, et al., 2016)。しかし,0G環境で継続してポインティング運動を行うと,速度曲線の上下方向間の相違が小さくなることが確認されており,このことは新しい環境(0G)に脳が適応することを示唆している。
なお,興味深いことに,水平方向へのポインティング運動ではあるが,過重力環境(2G)への曝露をシミュレーションした研究において,脳が重力の作用を過大に推定してしまう可能性が指摘されている(Gaveau, et al., 2011)。前方に位置するターゲットへのポインティング運動の軌道が,地球上(1G)での運動の軌道に比べて,上方へ逸脱するとシミュレーションされるのである。これは,過重力環境に曝露されると,身体に作用する推定上の重力が,実際の重力に比べて大きいと判断するがために認められる現象であると考えられる。
このように,私たちは地球上の重力(1G)に適応し,「重力(1G)」の脳内表象に基づいた運動制御を行っている。1Gと異なる重力環境に曝露された際に,新しい重力場に脳は適応するが,それは重力の内的な表象が修正されていることを示唆している。いずれ宇宙飛行(宇宙旅行)が簡便に行われるような時代が到来するかもしれない。そのような時,0G環境に私たちは適応する必要があるが,円滑に適応できるよう,適応予測因子の検討が行われている(Seidler, et al., 2015)。
おわりに─今後の展望
日常生活において,私たちが重力(1G)の存在を意識することは稀である。しかし,0G環境に曝露され,その新しい環境に適応することを体験した時,地球上の重力の存在を意識することになるであろう。
私たちは重力の力学的な作用を活かして運動制御を行っていることが筆者らの研究を含めて明らかになってきている。しかし,これまでの研究対象の多くはターゲットへ手を伸ばす比較的簡単な上肢運動である。
重力の鉛直下方向への牽引作用は,筋力に替わる運動の動力源になり得る。筋収縮は生理学的なエネルギー消費を伴うため,特に長時間の運動において,重力を動力源として運動制御に活かすことは高いパフォーマンスを維持する運動方略のひとつになり得る。ピアニストおよびピアノ初心者が打鍵する際に腕を振り下ろす運動を対象とした研究は,ピアノ初心者が上腕三頭筋を収縮させて打鍵するのに対して,ピアニストは上腕二頭筋を弛緩させて打鍵することを明らかにしている(Furuya, et al., 2009)。この打鍵運動におけるピアニストの重力利用が示唆するように,重力は運動制御における動力源となり得る。これまでの上肢運動を中心とした研究に加え,今後スポーツ動作などダイナミックな運動を対象とし,重力がどのように考慮され,活かされているのかを検討する必要があるだろう。
文献
- Berret, B., Darlot, C., Jean, F., Pozzo, T., Papaxanthis, C., & Gauthier, P.(2008) The inactivation principle: Mathematical solutions minimizing the absolute work and biological implications for the planning of arm movements. PLoS Computational Biology, 4, e1000194.
- Furuya, S., Osu, R., & Kinoshita, H.(2009) Effective utilization of gravity during arm downswing in keystrokes by expert pianists. Neuroscience, 164, 822-831.
- Gaveau, J., Berret, B., Angelaki, D.E., & Papaxanthis, C.(2016) Direction-dependent arm kinematics reveal optimal integration of gravity cues. eLife, 5, e16394.
- Gaveau, J., Paizis, C., Berret, B., Pozzo, T., & Papaxanthis, C.(2011) Sensorimotor adaptation of point-to-point arm movements after spaceflight: The role of internal representation of gravity force in trajectory planning. Journal of Neurophysiology, 106, 2, 620-629.
- Gaveau, J., & Papaxanthis, C.(2011) The temporal structure of vertical arm movements. PLoS One, 6, e22045.
- Gentili, R., Cahouet, V., & Papaxanthis, C.(2007) Motor planning of arm movements is direction-dependent in the gravity field. Neuroscience, 145, 20-32.
- McIntyre, J., Zago, M., Berthoz, A., & Lacquaniti, F.(2001) Does the brain model Newton’s laws? Nature Neuroscience, 4, 693-694.
- Papaxanthis, C., Pozzo, T., & McIntyre, J.(2005) Kinematic and dynamic processes for the control of pointing movements in humans revealed by short-term exposure to microgravity. Neuroscience, 135, 371-383.
- Seidler, R. D., Mulavara, A. P., Bloomberg J. J., & Peters, B. T.(2015) Individual predictors of sensorimotor adaptability. Frontiers in Systems Neuroscience, 9, 1-10.
- van de Kamp, C., & Zaal, F. T.(2007) Prehension is really reaching and grasping. Experimental Brain Research, 182, 27-34.
- Yamamoto, S., & Kushiro, K.(2014) Direction-dependent differences in temporal kinematics for vertical prehension movements. Experimental Brain Research, 232, 703-711.
- Yamamoto, S., Shiraki, Y., Uehara, S., & Kushiro, K.(2016) Motor control of downward object-transport movements with precision grip by object weight. Somatosensory & Motor Research, 33, 130-136.
- Zago, M., McIntyre, J., Senot, P., & Lacquaniti, F.(2008) Internal models and prediction of visual gravitational motion. Vision Research, 48, 1532-1538.
PDFをダウンロード
1