
刊行物



【小特集】
コウモリから学ぶエコーロケーション戦略

角谷 美和(すみや みわ)
Profile─角谷 美和
2018年,同志社大学生命医科学研究科博士後期課程修了。博士(工学)。同年より,国立研究開発法人情報通信研究機構脳情報通信融合研究センターに所属して現職。専門は生物音響工学。

飛龍 志津子(ひりゅう しづこ)
Profile─飛龍 志津子
1999年,日本アイ・ビー・エム株式会社に入社。2006年,同志社大学大学院工学研究科博士後期課程修了。博士(工学)。JSTさきがけ研究員を経て2017年より現職。専門は生物音響工学。
コウモリのエコーロケーション
エコーロケーションを行うイルカやコウモリは,自ら超音波を発し,周囲からの反響音(エコー)と聴き比べることで,視覚の利かない暗闇でも周囲を「音で見る」ことができる。特に,種数が哺乳類全体の約5分の1を占めるコウモリは,生態学的に極めて多様な哺乳類のグループの一つとも言える[1]。諸説あるもののコウモリは,進化の過程において,翼を発達させることで空中での採餌(餌となる獲物を探して捕まえること)を可能にし,採餌飛行を夜間に制限することで高速で飛行する天敵(鳥)から身を守ってきたと考えられている[2]。視覚の利かない夜間に飛行しながらの採餌を行う,つまり「生き抜くため」に必要不可欠な能力としてエコーロケーションは獲得されたと言える。
コウモリは生息環境や捕食に適した超音波をエコーロケーション信号として用いる(e.g., [2])。コウモリのエコーロケーション音声(以後パルス)は,①広い帯域を持つ周波数変調(Frequency modulated:FM)音と,②周波数が一定の周波数定常(Constant frequency:CF)音の前後に短いFM音が付いたCF-FM音の2種類に大別できる。例えば,市街地でも見かけるアブラコウモリ(図1A)はFM音を,森林内の洞窟に生息するキクガシラコウモリ(図1B)はCF-FM音を用いるコウモリに分類される。広帯域なFM音は時間分解能が高く,獲物までの距離や角度の計測に適している(e.g., [3])。また,FM音を用いることで,周波数スペクトルの情報も取得できるため,標的の詳細な特徴を捉える際にも効果的であると考えられている(e.g., [4])。一方CF音は,周波数が一定であるため距離計測やスペクトル情報の取得には適さないが,エネルギーが狭帯域に集中する音声は遠方まで届き,獲物の検出に適している。またCF-FM音を用いるコウモリは,CF音付近で感度が極めて高い聴覚系を有しており(e.g., [5]),エコーの周波数が感度の高い値で一定するようにパルスの周波数を調整するドップラーシフト補償行動(e.g., [6])を行うことで知られている。これにより,コウモリは飛翔昆虫のはばたきに応じてエコーのCF部分に生じる微小な振幅変調や周波数変調を検出していると考えられている(e.g., [7])。
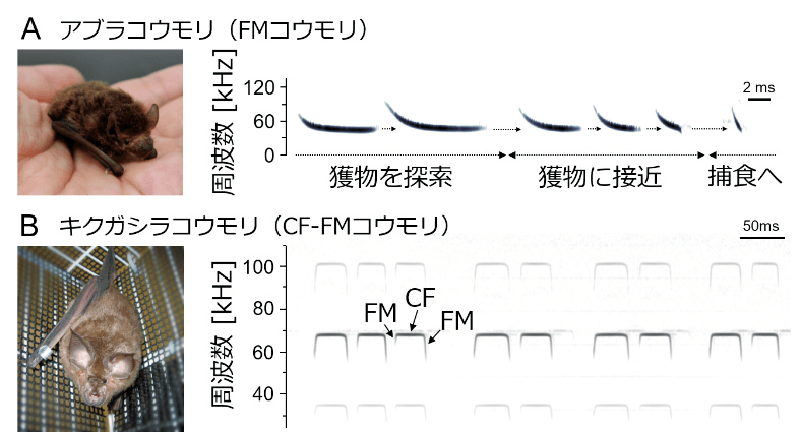
図1Aは,野外のオープンスペースにおいて採餌飛行中のアブラコウモリが放射したパルス[8]の例を示している。FM音を用いるコウモリであっても,獲物探索時にはFM音の末端を長く,まるでCF音のような帯域の狭いパルスを放射していることがわかる(図1A)。先述のようにCF音は遠方の獲物の検出に適していることから,アブラコウモリの探索時にみられる長いパルスからは,コウモリが遠方に注意を払って獲物を探索していることが読み取れる。やがてコウモリは,獲物を見つけると,短い時間で急激に周波数が下降するFM音へと徐々に変化させながら,獲物に接近していく(図1A)。FM成分を強調することで,最後の瞬間まで獲物を取り逃がさないよう,獲物の位置を高精度に把握しているのであろう。またコウモリは,パルスの時間周波数構造の他にも,音圧や放射時間間隔などの様々なパラメータを,飛行環境や目的に応じて柔軟に調整しながら,エコーロケーションを行っている(e.g., [9])。
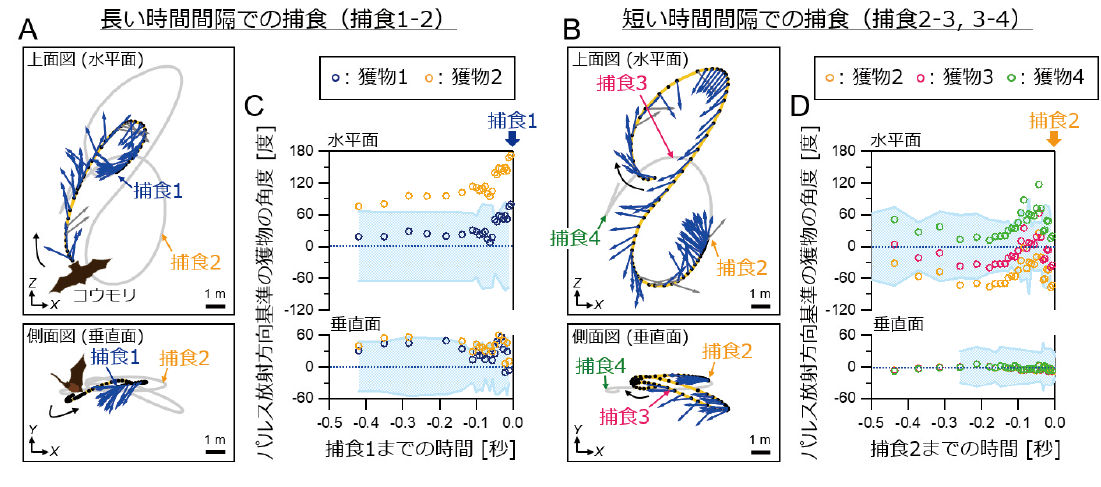
パルスの放射方向はヒトで言う視線,またパルスのビーム幅は視野に相当する。コウモリはこれらを飛行と協調的に制御することで,高度なナビゲーションを実現している(e.g., [10])。例えばアブラコウモリは,飛行方向以外の方向にもパルスを向けながら飛行し(図2A, B),そして時折,極めて短い時間間隔で複数の獲物を連続して捕食する(図2B)。音響的視野と獲物の角度の関係を調べてみると,2匹の獲物を長い時間間隔で捕食する際には(図2A),目先の獲物だけが音響的視野内に捉えられているのに対して(図2C),短い時間間隔で複数の獲物を連続して捕食する際には(図2B),目先の獲物だけではなく,同時にその先の獲物も音響的視野内に捉えていることがわかる(図2D)[11]。さらに数理モデリングによる分析から,コウモリが複数の獲物に注意を向けた飛行ルートを計画していることや,捕食成功率が高いルートを選択していることも明らかとなった[12]。これらは,コウモリが音響と飛行の選択的注意を協調的に制御しながら効率の良い採餌を実現している可能性を示唆している。このように,エコーロケーション行動の計測や数学的アプローチにより,コウモリが生き抜くために洗練させたユニークで合理的なエコーロケーション戦略や,その裏に隠された彼らの意思を読み解くことができると考えられる。
ヒトへの応用
一方,視覚障害者の中には,自身が発する舌打ち音を用いたエコーロケーションを日常的に行う人々が存在する。彼らは,エコーロケーションを行うことで,旅行中に街を散策することやマウンテンバイクに乗ることなどもできると報告されている[13]。これまでのヒューマンエコーロケーションに関する先行研究では,主に物体検知,距離弁別,方向定位,サイズ弁別等の能力を測る心理実験(e.g., [14])や,熟練者が持つエコーロケーション能力に関する神経基盤を明らかにするための脳活動計測(e.g., [13])なども行われている。そのような中で筆者らは,コウモリの研究で得た知見を活かすことで,ヒトのエコーロケーションの能力がどこまで拡張できるだろうかと考えた。またヒューマンエコーロケーションの研究によって,これまでの行動実験のみではわからなかった「コウモリが音でどのように世界を感じ取っているか」を真に理解できるかもしれない。
現在筆者らは,コウモリの実験に加え,ヒトを対象とした音響心理実験を開始し,コウモリのように目的に合わせて適切にエコーロケーション信号をデザインすることで,エコーロケーション未経験者でも,エッジ形状やテクスチャーなどを物体からのエコーを聞くことで弁別できることが分かってきた[15]。最新の情報技術と組み合わせて,コウモリのユニークな戦略を取り入れたエコーロケーションを提案していきたいと考えている。音で感じる新たな世界観を,視覚障害者のみならず様々な人々にも提供できるようになるかもしれない。
文献
- 1. Simmons, et al. (2008). Nature, 451, 818-821.
- 2. Neuweiler (1984). Naturwissenschaften, 71, 446-455.
- 3. Simmons (1973). J Acoust Soc Am, 54, 157-173.
- 4. Falk, et al. (2011). J Comp Physiol A, 197, 491-503.
- 5. Suga & Jen (1976). Science, 194, 542-544.
- 6. Hiryu, et al. (2008). J Comp Physiol A, 194, 841-851.
- 7. von der Emde & Schnitzler (1990). J Comp Physiol A, 167, 423-430.
- 8. Fujioka, et al. (2011). J Acoust Soc Am, 129, 1081-1088.
- 9. Surlykke & Moss (2000). J Acoust Soc Am, 108, 2419-2429.
- 10. Matsuta, et al. (2013). J Exp Biol, 216, 1210-1218.
- 11. Sumiya, et al. (2017). PloS one, 12, e0169995.
- 12. Fujioka, et al. (2016). Proc Natl Acad Sci, 113, 4848-4852.
- 13. Thaler, et al. (2011). PLoS One, 6, e20162.
- 14. Milne, et al. (2015). Neurocase, 21, 465-470.
- 15. Sumiya, et al. (2019). J Acoust Soc Am, 145, 2221-2236.
PDFをダウンロード
1